聯系電話

天津福業動力機械科技發展有限公司
 初級會員·10年
初級會員·10年
 具體成交價以合同協議為準
具體成交價以合同協議為準
- 聯系人:
- 張小姐
- 電話:
- 13132097161
- 手機:
- 13032283801
- 售后:
- 13032283801
- 傳真:
- 86-022-86427998
- 地址:
- 天津市西青區新科道
掃一掃訪問手機商鋪
微信掃碼進入微名片
產品簡介
| 產地 | 進口 | 銷售區域 | 全國,華東,華南,華北,華中,東北,西南,西北,港澳臺,海外 |
|---|
導軌滑塊KUVE45-B-SNL-W2-V1-G1/1090-20/20
產品介紹
導軌滑塊KUVE45-B-SNL-W2-V1-G1/1090-20/20
天津福業動力機械科技發展有限公司
氣缸是由缸筒、端蓋、活塞、活塞桿和密封件等組成,其內部結構如圖《SMC氣缸原理圖》所示:
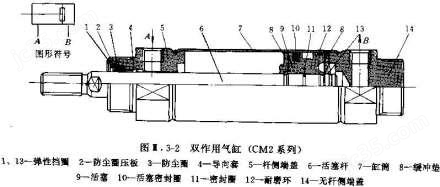 SMC氣缸原理圖
SMC氣缸原理圖缸筒的內徑大小代表了氣缸輸出力的大小。活塞要在缸筒內做平穩的往復滑動,缸筒內表面的表面粗糙度應達到Ra0.8μm。
SMC、 CM2氣缸活塞上采用組合密封圈實現雙向密封,活塞與活塞桿用壓鉚鏈接,不用螺母。
2)端蓋
端蓋上設有進排氣通口,有的還在端蓋內設有緩沖機構。桿側端蓋上設有密封圈和防塵圈,以防止從活塞桿處向外漏氣和防止外部灰塵混入缸內。桿側端蓋上設有導向套,以提高氣缸的導向精度,承受活塞桿上少量的橫向負載,減小活塞桿伸出時的下彎量,延長氣缸使用壽命。導向套通常使用燒結含油合金、前傾銅鑄件。端蓋過去常用可鍛鑄鐵,為減輕重量并防銹,常使用鋁合金壓鑄,微型缸有使用黃銅材料的。
導軌滑塊KUVE45-B-SNL-W2-V1-G1/1090-20/20
工作范圍是指機器人操作臂末端或手腕中心所能到達的所有點的集合,也叫做工作區域。因為末端執行器的形狀和尺寸是多種多樣的,為了真實反映機器人的特征參數,所以是指不安裝末端執行器時的工作區域。工作范圍的形狀和大小是十分重要的。機器人在執行某一作業時,可能會因為存在手部不能到達的作業死區(dead zone)而不能完成任務。
機器人操作臂的工作范圍根據工藝要求和操作運動的軌跡來確定。一個操作運動的軌跡往往是幾個動作合成的,在確定工作范圍時,可將運動軌跡分解成單個動作,由單個動作的行程確定機器人操作臂的最大行程。為便于調整,可適當加大行程數值。各個動作的最大行程確定之后,機器人操作臂的工作范圍也就定下來了




